アクロボット
| アクロボットとは・・・ |
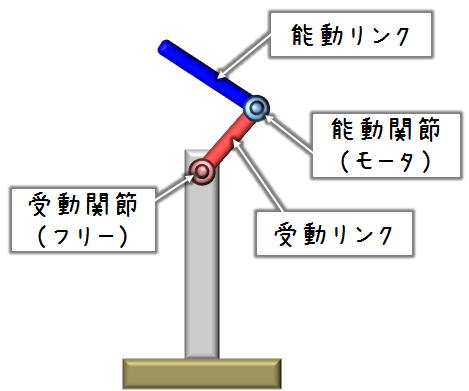
| アクロボット (Acrobot) とはアクロバットロボット (Acrobat Robot) の略であり,その名の通り,器械体操の様々なアクロバティックな(曲芸的な)動きをさせることができる簡略モデルです. 最も単純な構造のアクロボットは,右図に示す,2 リンクの劣駆動マニピュレータです. |
 |
|
| 注)マニピュレータ:人間の手や上肢と同等の機能を持たせることによって,人間の作業を 代わりにさせることのできる機械やロボットのことです. 注)劣駆動:通常のロボットマニピュレータは,各関節ごとにモータなどのアクチュエータ を備えています.それに対して,劣駆動のロボットマニピュレータは,アクチュエータ を備えていない関節(受動関節)を持ち,システムの自由度よりも入力の数が少ないた め,制御が困難となります. |
||
| 以下にアクロボットが模倣することを目指している器械体操の動作の一例を示します. | ||
| 【大車輪運動】 | 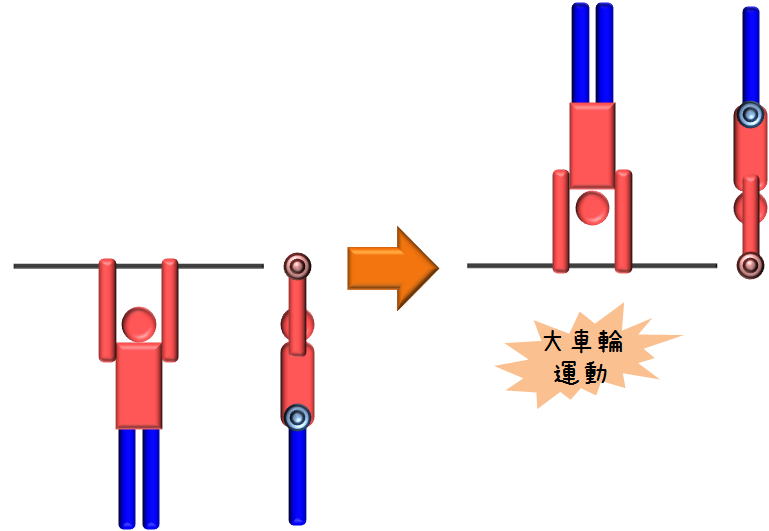 |
|
| 【蹴上がり運動】 | 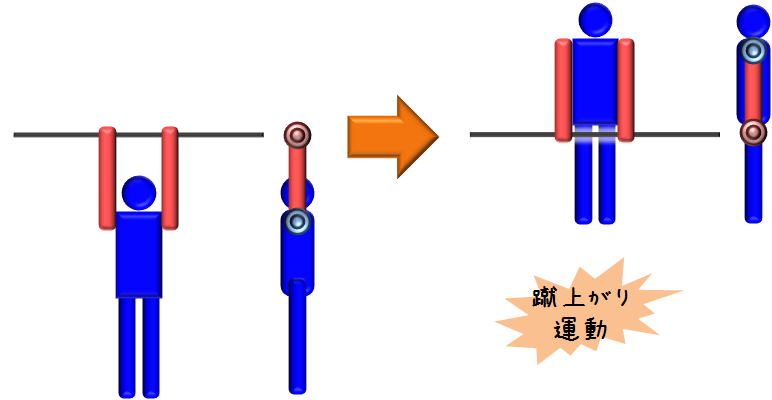 |
|
| 【上水平支持】 | 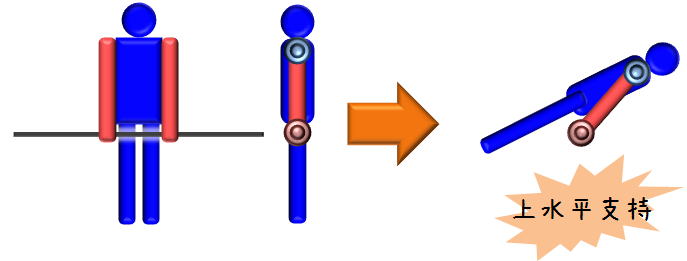 |