アクロボット
| 直接駆動型アクロボット |
 |
左図の実験装置は荻野純平君,山下恵梨佳さん(共に 2005 年度卒業生)が製作し,荻野純平君(2007 年度修了生)が改良しました. | |
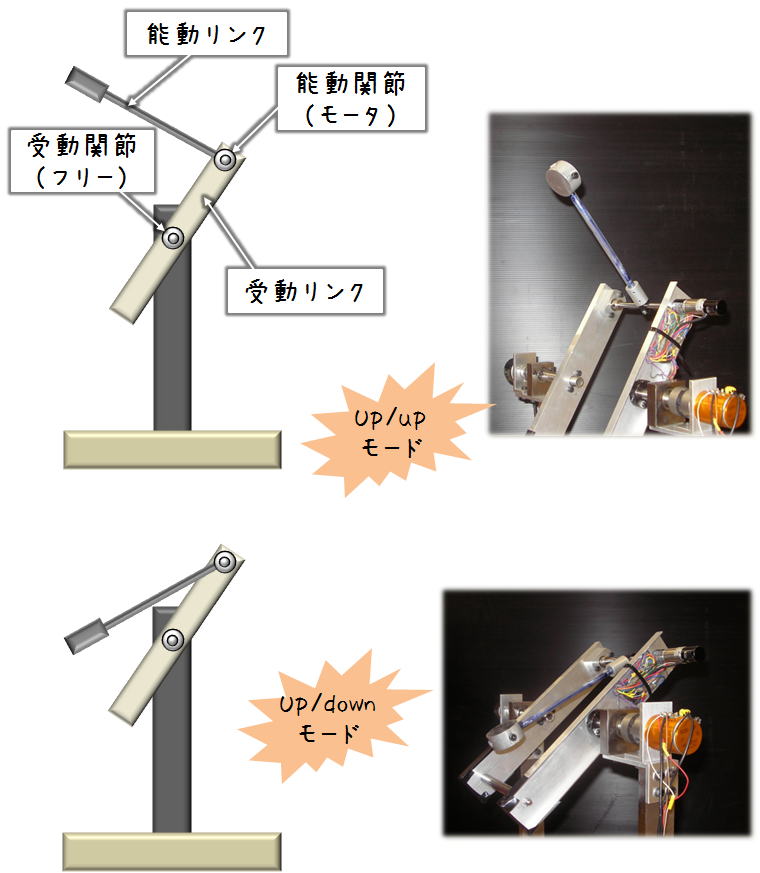
| 上図の直接駆動型アクロボット (Directly Driven Acrobot) は,駆動リンクがモータ軸に直結されています.up/down
モードは「吊り輪運動の上水平支持」,up/up モードは「鉄棒運動の倒立姿勢」に相当します. SOS に基づくゲインスケジュールド制御を行ったときの実験結果を以下に示します. |
||
| up/down モード | up/up モード | |