システム制御情報学会 学会誌 「システム/制御/情報」 55 巻 5 号,2011 年
[2] LMI に基づく制御系解析・設計(川田・蛯原)
adip.m
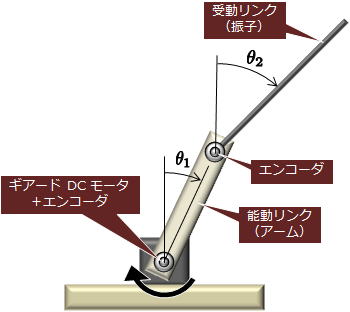
M ファイル adip.m は,図 1 に示すアーム型倒立振子(pendubot ともよばれる)の LPV モデル
の係数行列を与えるものである.以下に,その導出手順を示す.
 |
 |
 |
|
| 図 1 アーム型倒立振子 <動画> GS 制御(30 [deg],45 [deg],60 [deg]), LQ 制御(30 [deg],45 [deg]) |
|
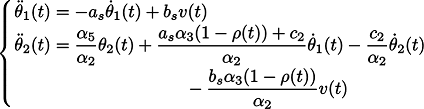
図 1 に示すアーム型倒立振子は,速度制御型モータドライバによりギアード DC モータが駆動されている.このことを考慮すると,振子がアームに与える影響は十分小さいので,アーム型倒立振子の非線形モデルは,

となる.ただし,

であり(パラメータの意味については,M ファイルを参照),
 |
| 図 2 初期状態と目標状態 |
ここで,図 2 に示す初期状態から目標状態に制御することを想定し,以下の仮定を設ける.
| (I) | 振子は倒立点近傍 (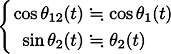 である. |
| (II) | 遠心力・コリオリ力の項 |

のように単純化される.この上式を下式に代入し,さらに,スケジューリングパラメータを
と定義すると,
すなわち,
が得られる.
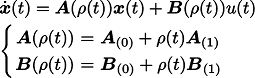
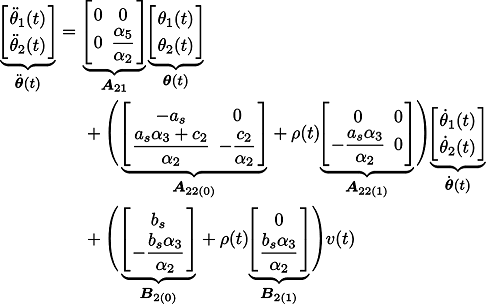
以上より,状態変数と操作量をそれぞれ
とすると,LPV モデル
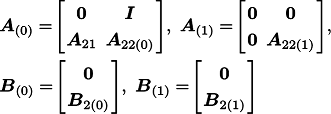
で表すことができ,その係数行列は以下のようになる.
参考文献
- 川田,市原:SOS に基づくアーム型倒立振子のゲインスケジューリング制御,第 10 回 SICE 制御部門大会,(2010)
- H. Ichihara and M. Kawata: Gain scheduling control of an arm-driven inverted pendulum based on sum of squares: comparison with a SDRE method, the 18th IFAC World Congress, to appear, (2011)
| 前のページ (kawata_ebihara.zip) に戻る |