『初学者のための図解でわかる制御工学 I』 特集号
川田:制御への道しるべ -- 倒立振子の概要と制御系設計の流れ
ここでは,本解説で紹介した様々な「倒立振子」の写真や動画を掲載します.
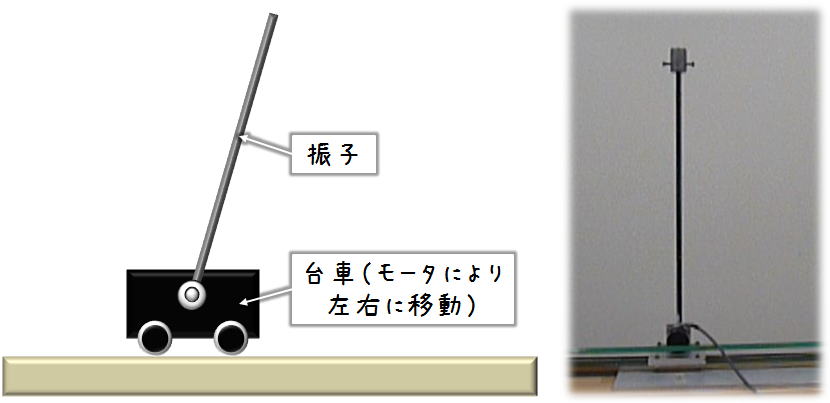
| 台車型倒立振子 | ||
|
| 回転型倒立振子 | |||
|
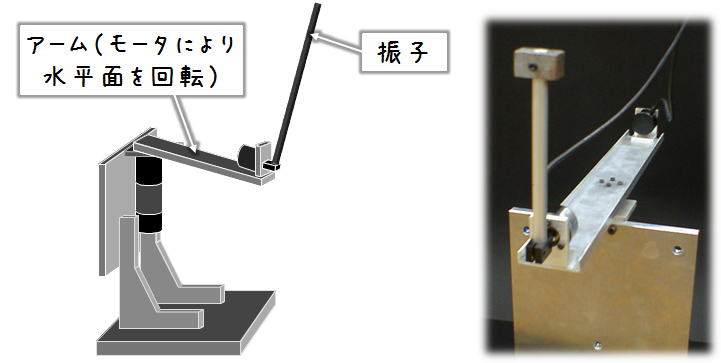
| アーム型倒立振子 | ||
|
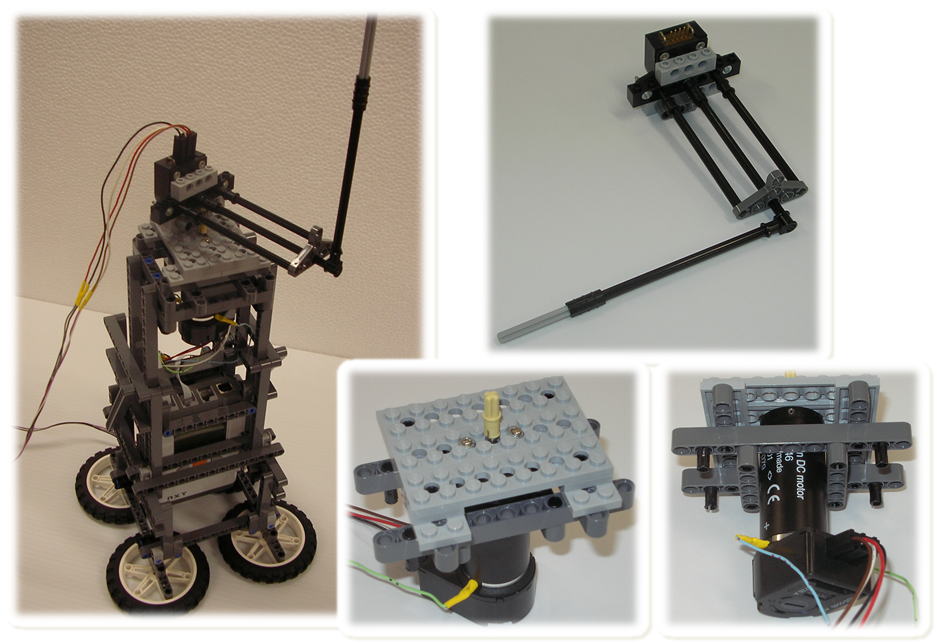
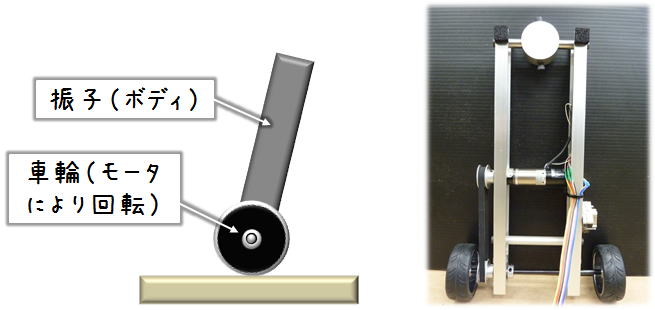
| 車輪型倒立振子 | ||||||||
|
||||||||


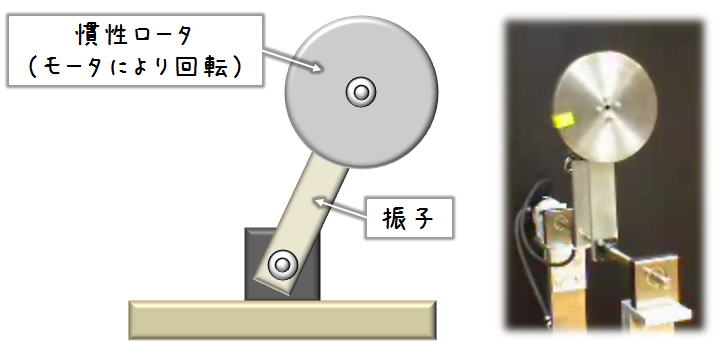
| 慣性ロータによる倒立振子 | ||||
|

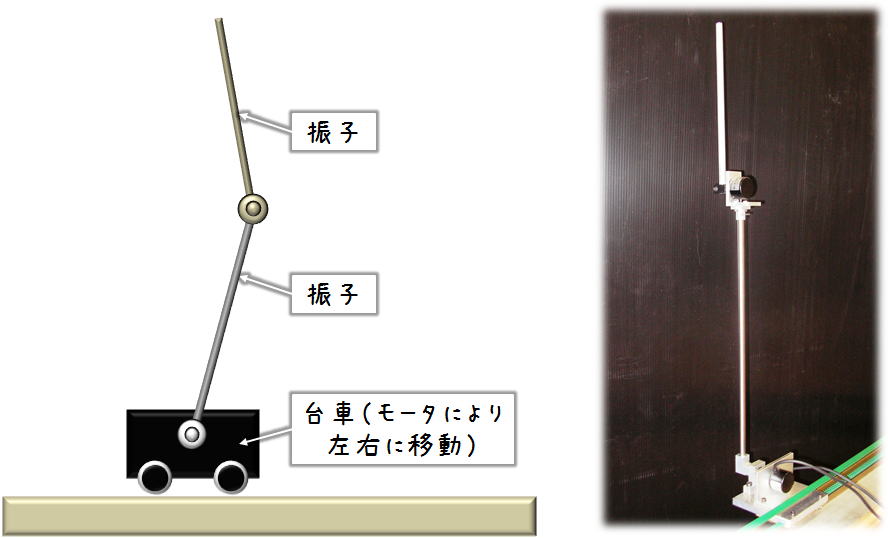
| 台車型直列二重倒立振子 | ||
|
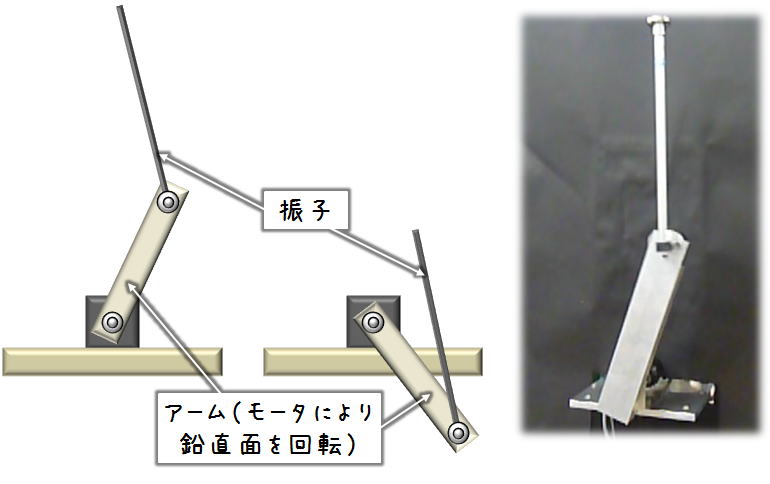
| シーソー型倒立振子 | ||
|

contents

contents
contents
contents
contents
contents
contents