- 配布するファイル等の動作保証およびテクニカルサポート,発生した損害に対する責任は負いません.
- 2017 年 5 月 2 日に確認したところ,Simulink Support Package for LEGO MINDSTORMS NXT Hardware が利用可能な MATLAB のバージョンは,R2014a から R2016b までとなっています (R2017a 以降および R2013b 以前は利用できません).
|
【ハードウェア】
【ソフトウェア】
|
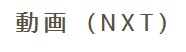
PID 制御の基礎
モータ角度の ON/OFF 制御 (4.2 節)
|
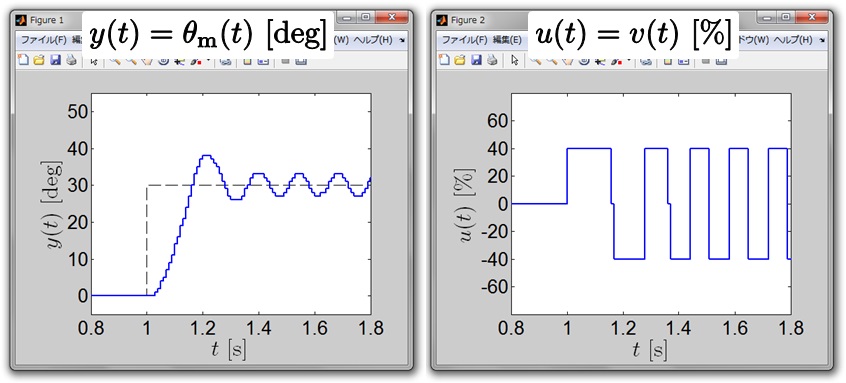
モータ角度の P 制御 (4.3 節)
|
|
\({k}_{\rm P} = 1\) |
|
\({k}_{\rm P} = 2\) |
|
\({k}_{\rm P} = 3\) |
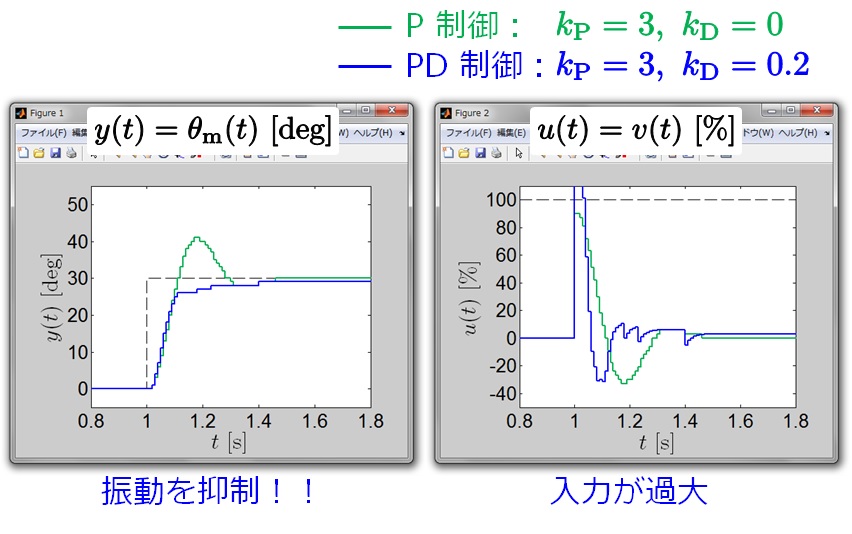
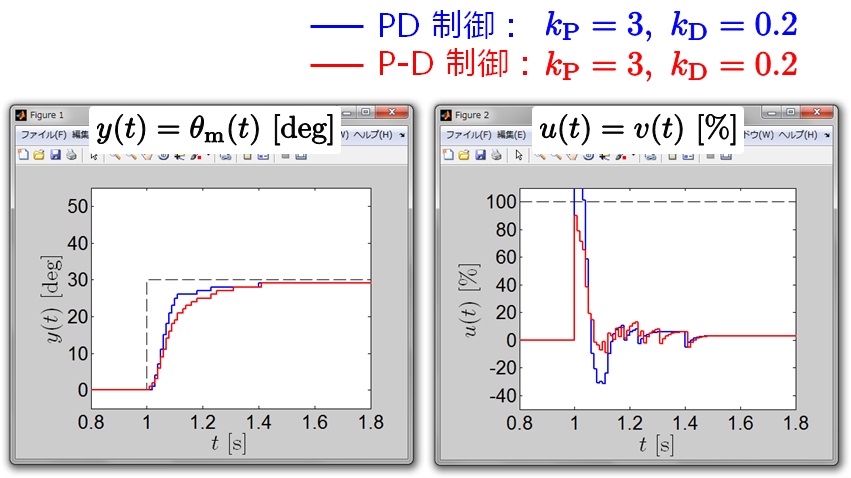
モータ角度の PD 制御と P-D 制御 (4.4 節)
|
|
P 制御:\({k}_{\rm P} = 3,\ {k}_{\rm D} = 0\) |
|
PD 制御:\({k}_{\rm P} = 3,\ {k}_{\rm D} = 0.2\) |
|
|
PD 制御:\({k}_{\rm P} = 3,\ {k}_{\rm D} = 0.2\) |
|
P-D 制御 (微分先行型 PD 制御):\({k}_{\rm P} = 3,\ {k}_{\rm D} = 0.2\) |
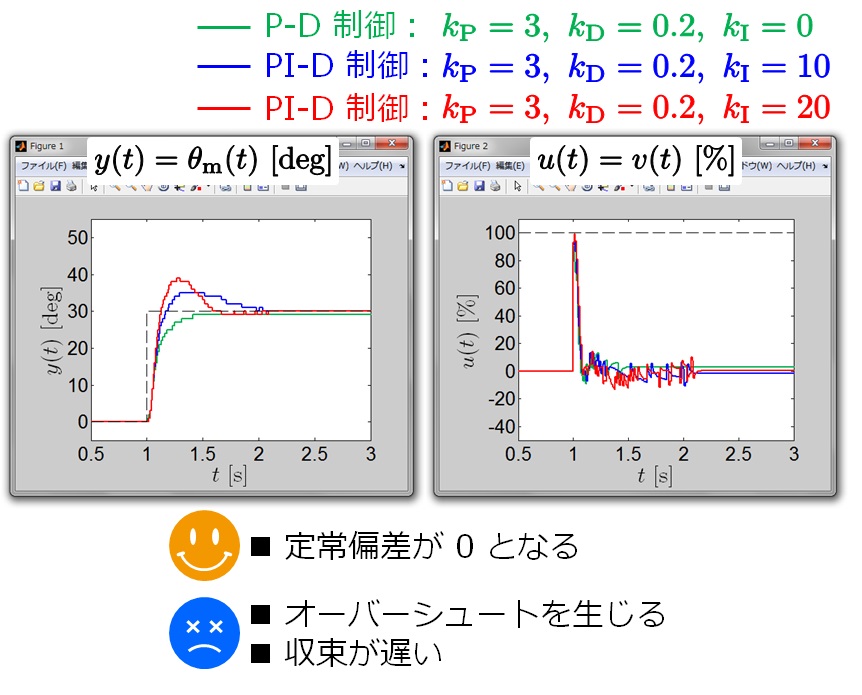
モータ角度の PI-D 制御 (4.5 節)
|
|
P-D 制御 (微分先行型 PD 制御):\({k}_{\rm P} = 3,\ {k}_{\rm D} = 0.2,\ {k}_{\rm I} = 0\) |
|
PI-D 制御 (微分先行型 PID 制御):\({k}_{\rm P} = 3,\ {k}_{\rm D} = 0.2,\ {k}_{\rm I} = 10\) |
|
PI-D 制御 (微分先行型 PID 制御):\({k}_{\rm P} = 3,\ {k}_{\rm D} = 0.2,\ {k}_{\rm I} = 20\) |
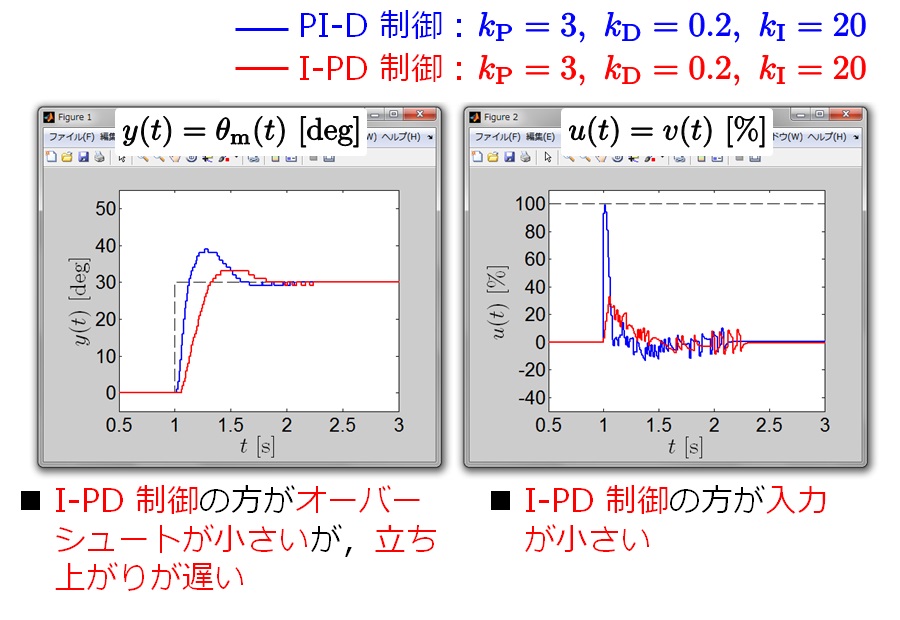
モータ角度の I-PD 制御 (4.6 節)
|
|
PI-D 制御 (微分先行型 PID 制御):\({k}_{\rm P} = 3,\ {k}_{\rm D} = 0.2,\ {k}_{\rm I} = 20\) |
|
I-PD 制御 (比例・微分先行型 PID 制御):\({k}_{\rm P} = 3,\ {k}_{\rm D} = 0.2,\ {k}_{\rm I} = 20\) |
|
|
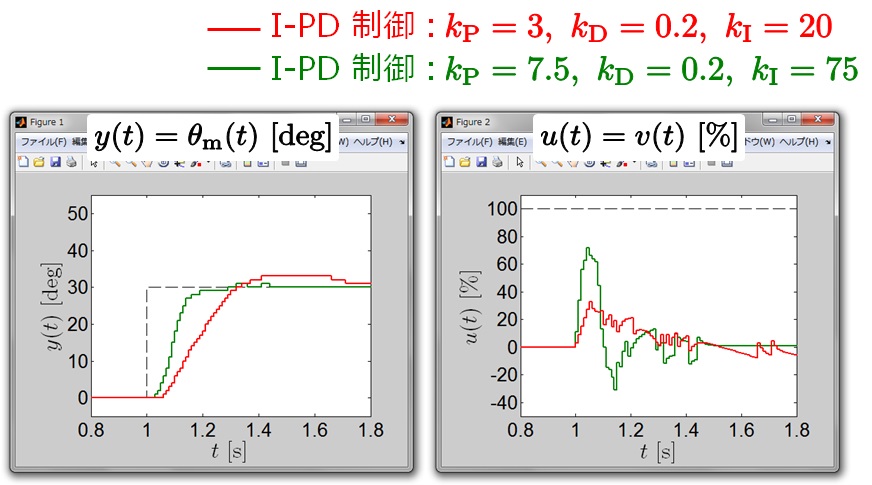
I-PD 制御 (比例・微分先行型 PID 制御):\({k}_{\rm P} = 3,\ {k}_{\rm D} = 0.2,\ {k}_{\rm I} = 20\) |
|
I-PD 制御 (比例・微分先行型 PID 制御):\({k}_{\rm P} = 7.5,\ {k}_{\rm D} = 0.2,\ {k}_{\rm I} = 75\) |
ライントレースカーへの応用 (4.7 節)
|
ON/OFF 制御 |
|
P 制御 |