- 配布するファイル等の動作保証およびテクニカルサポート,発生した損害に対する責任は負いません.
- 2017 年 5 月 2 日に確認したところ,Simulink Support Package for LEGO MINDSTORMS NXT Hardware が利用可能な MATLAB のバージョンは,R2014a から R2016b までとなっています (R2017a 以降および R2013b 以前は利用できません).
|
【ハードウェア】
【ソフトウェア】
|
経験則による PID コントローラの設計
ジーグラ・ニコルスの限界感度法
【ステップ 1】
\({k}_{\rm P} = 10\) のとき,収束する.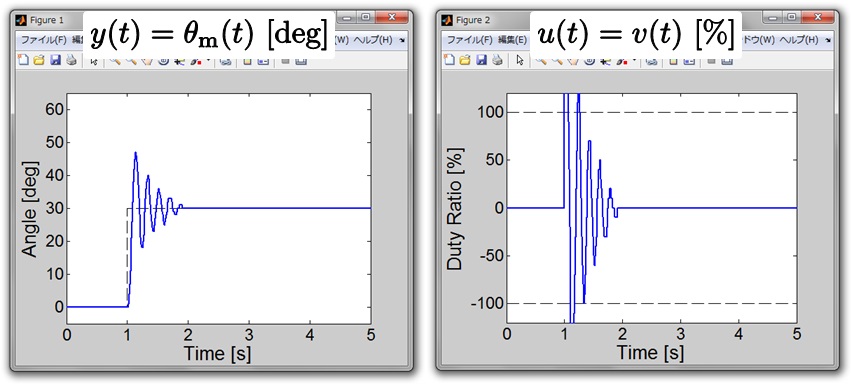
|
\({k}_{\rm P} = 15\) のとき,収束する.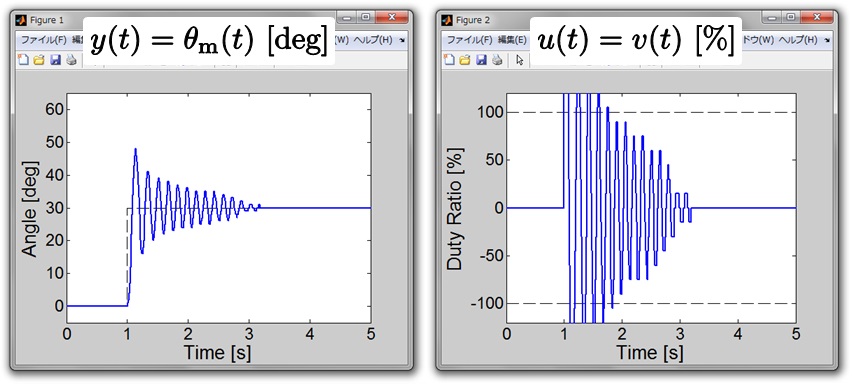
|
\({k}_{\rm P} = 17\) のとき,持続振動をする.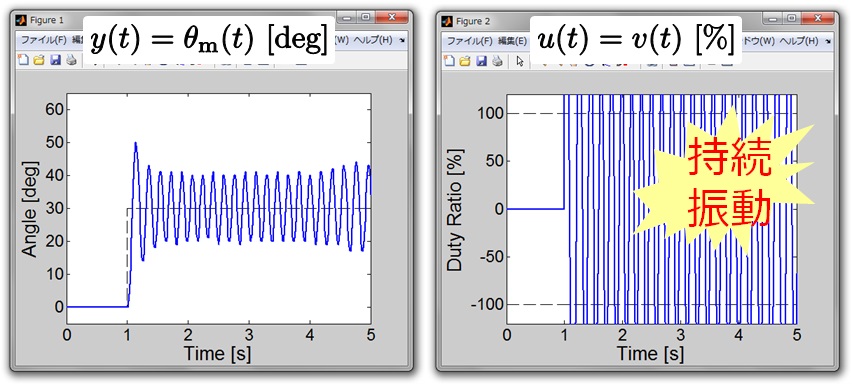
限界ゲイン:\({k}_{\rm Pc} = 17\),限界周期:\({T}_{\rm c} = 0.186\ {\rm [s]}\) (4 秒間で 21.5 周期) |
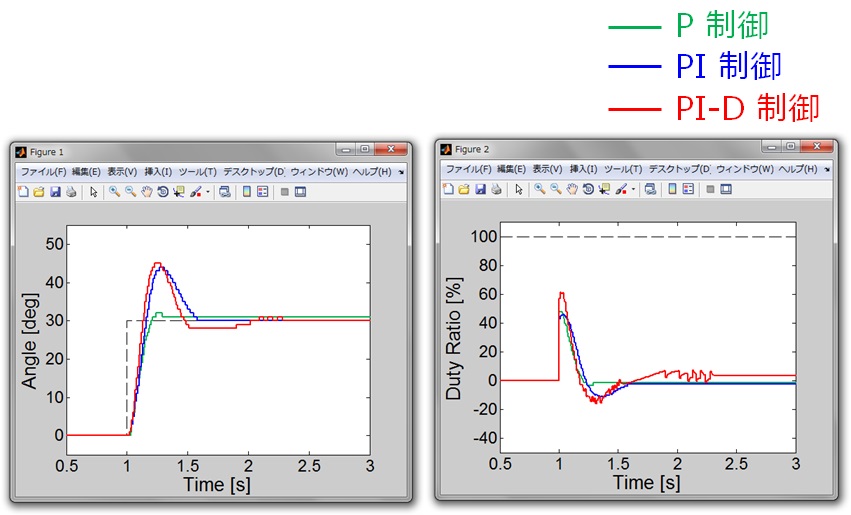
【ステップ 2】
|
|
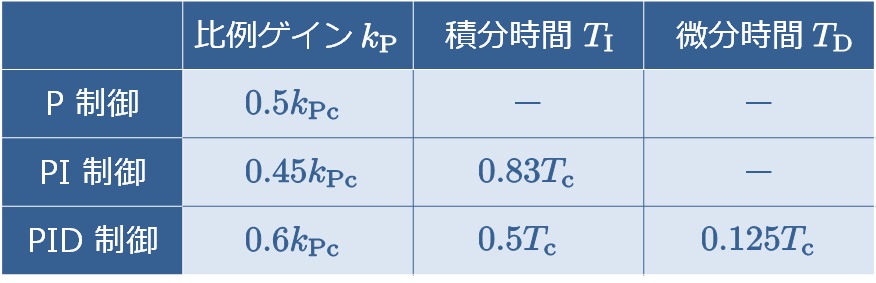
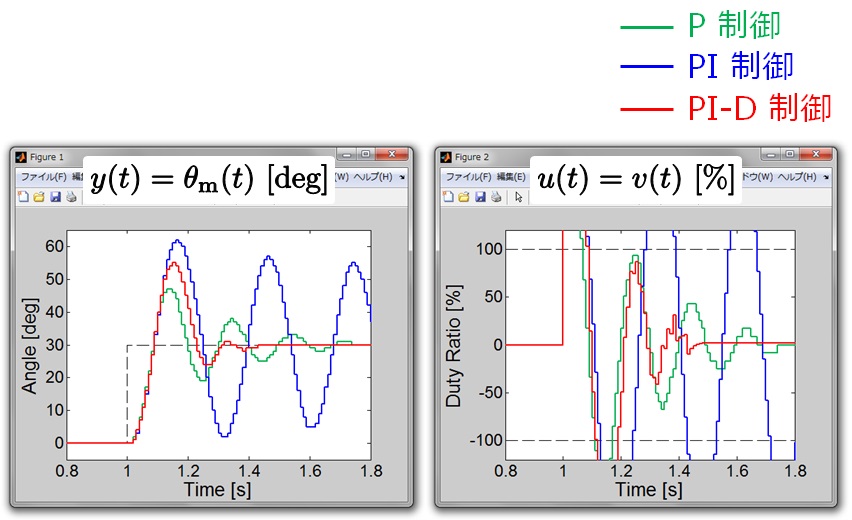
P 制御:\({k}_{\rm P} = 8.50\) |
|
PI 制御:\({k}_{\rm P} = 7.65,\ {k}_{\rm I} = \dfrac{{k}_{\rm P}}{{T}_{\rm I}} = 49.5\) |
|
PI-D 制御:\({k}_{\rm P} = 10.2,\ {k}_{\rm I} = \dfrac{{k}_{\rm P}}{{T}_{\rm I}} = 110,\ {k}_{\rm D} = {k}_{\rm P}{T}_{\rm D} = 0.237\) |
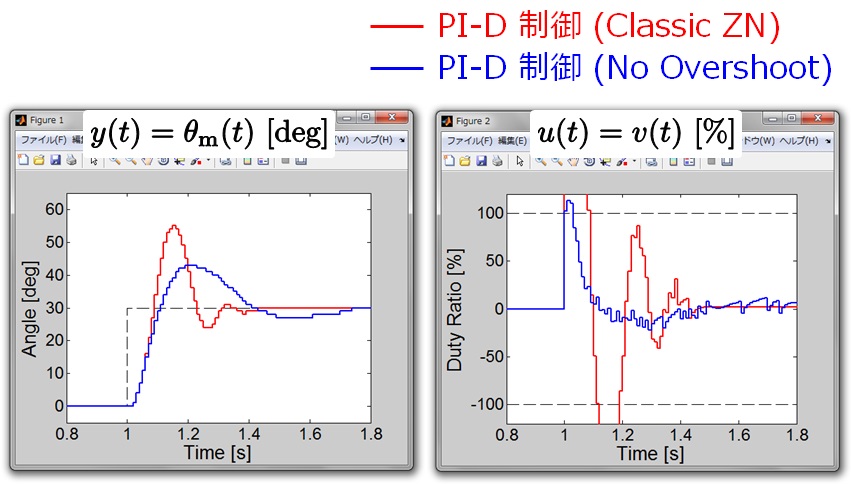
【応答の改善 (1)】
|
|
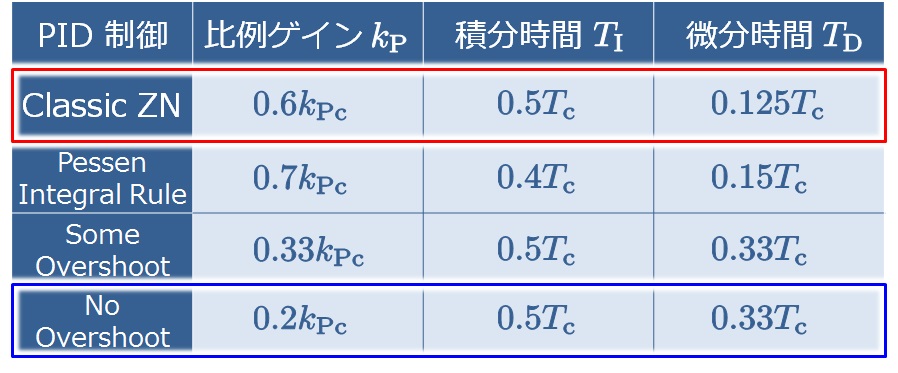
PI-D 制御 (Classic):\({k}_{\rm P} = 10.2,\ {k}_{\rm I} = \dfrac{{k}_{\rm P}}{{T}_{\rm I}} = 110,\ {k}_{\rm D} = {k}_{\rm P}{T}_{\rm D} = 0.237\) |
|
PI-D 制御 (No Overshoot):\({k}_{\rm P} = 3.40,\ {k}_{\rm I} = \dfrac{{k}_{\rm P}}{{T}_{\rm I}} = 36.6,\ {k}_{\rm D} = {k}_{\rm P}{T}_{\rm D} = 0.209\) |
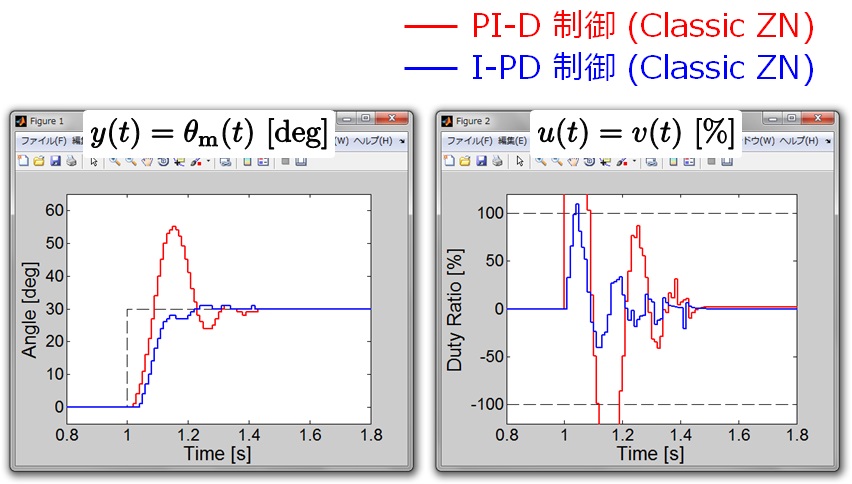
【応答の改善 (2)】
|
|
PI-D 制御:\({k}_{\rm P} = 10.2,\ {k}_{\rm I} = \dfrac{{k}_{\rm P}}{{T}_{\rm I}} = 110,\ {k}_{\rm D} = {k}_{\rm P}{T}_{\rm D} = 0.237\) |
|
I-PD 制御:\({k}_{\rm P} = 10.2,\ {k}_{\rm I} = \dfrac{{k}_{\rm P}}{{T}_{\rm I}} = 110,\ {k}_{\rm D} = {k}_{\rm P}{T}_{\rm D} = 0.237\) |
ジーグラ・ニコルスのステップ応答法 (5.3 節)
【ステップ 1】
|
\(u(t) = {u}_{\rm c} = 100\ {\rm [\%]}\) |
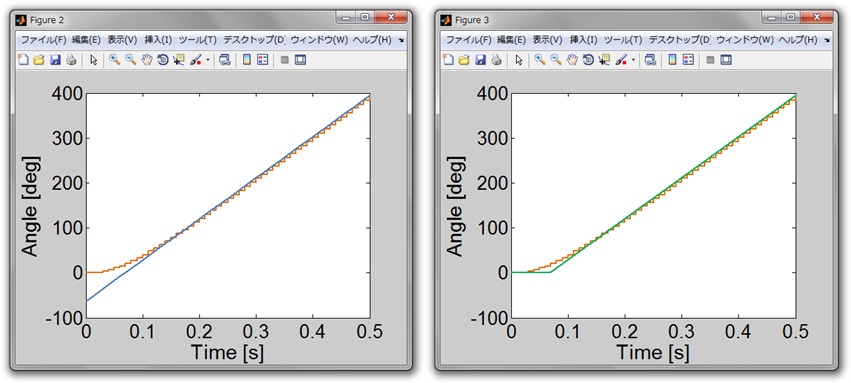 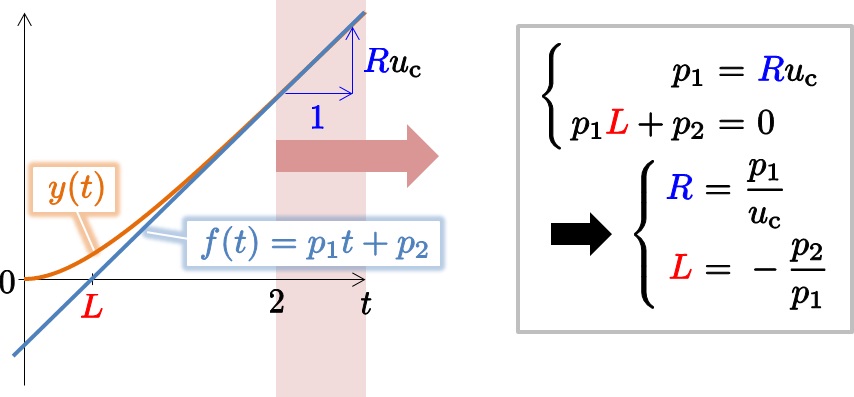 \(R = 9.15 \times {10}^{0},\ L = 6.87 \times {10}^{-2}\) |
【ステップ 2】
|
|
P 制御:\({k}_{\rm P} = 1.59\) |
|
PI 制御:\({k}_{\rm P} = 1.43,\ {k}_{\rm I} = \dfrac{{k}_{\rm P}}{{T}_{\rm I}} = 6.31\) |
|
PI-D 制御:\({k}_{\rm P} = 1.91,\ {k}_{\rm I} = \dfrac{{k}_{\rm P}}{{T}_{\rm I}} = 13.9,\ {k}_{\rm D} = {k}_{\rm P}{T}_{\rm D} = 0.0656\) |