- ”z•z‚·‚éƒtƒ@ƒCƒ‹“™‚ج“®چى•غڈط‚¨‚و‚رƒeƒNƒjƒJƒ‹ƒTƒ|پ[ƒgپC”گ¶‚µ‚½‘¹ٹQ‚ة‘خ‚·‚éگس”C‚ح•‰‚¢‚ـ‚¹‚ٌپD
-
2017 ”N 5 Œژ 2 “ْ‚ةٹm”F‚µ‚½‚ئ‚±‚ëپCSimulink Support Package for LEGO MINDSTORMS NXT Hardware ‚ھ—ک—p‰آ”\‚ب MATLAB ‚جƒoپ[ƒWƒ‡ƒ“‚حپCR2014a ‚©‚ç R2016b ‚ـ‚إ‚ئ‚ب‚ء‚ؤ‚¢‚ـ‚· (R2017a ˆبچ~‚¨‚و‚ر R2013b ˆب‘O‚ح—ک—p‚إ‚«‚ـ‚¹‚ٌ)پD
|
پyƒnپ[ƒhƒEƒFƒAپz
پyƒ\ƒtƒgƒEƒFƒAپz
|
‰ٌ“]Œ^“|—§گUژq‚جƒ‚ƒfƒٹƒ“ƒO
2 ژں’x‚êŒn‚ج“ءگ«‚ة’چ–ع‚µ‚½“¯’è (6.4 گك)
ƒAپ[ƒ€‚جƒpƒ‰ƒپپ[ƒ^“¯’è
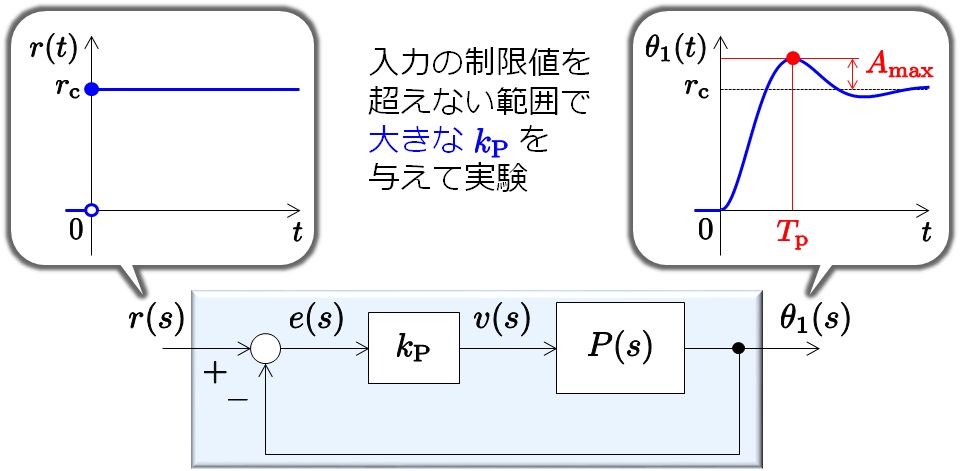
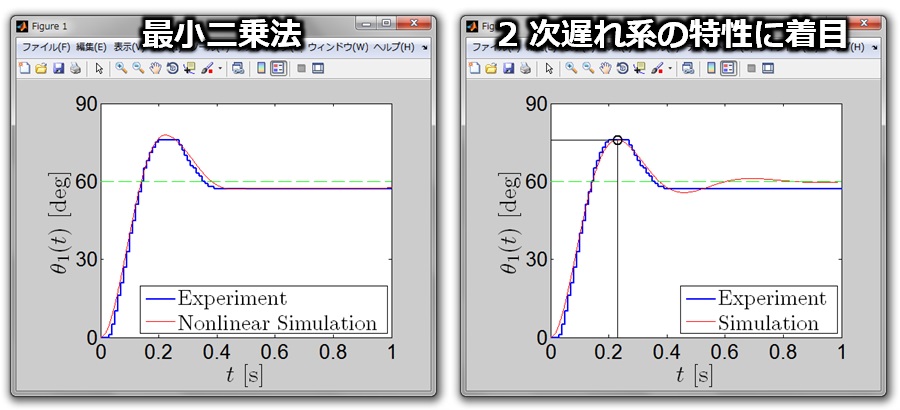
پ@ƒAپ[ƒ€‚ج P گ§Œن‚ًچs‚¢پCچs‚«‰ك‚¬ژٹش \({T}_{\rm p}\) ‚ئƒIپ[ƒoپ[ƒVƒ…پ[ƒg \({A}_{\rm max}\) ‚©‚ç–¢’mƒpƒ‰ƒپپ[ƒ^‚ً“¯’肵‚ـ‚·پD
گUژq‚جƒpƒ‰ƒپپ[ƒ^“¯’è
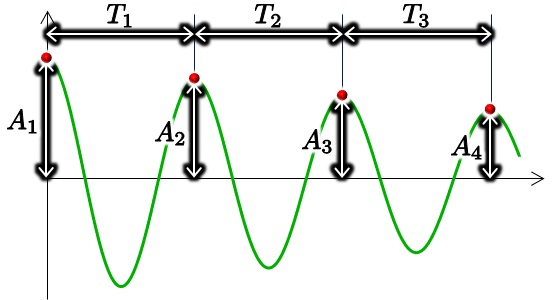
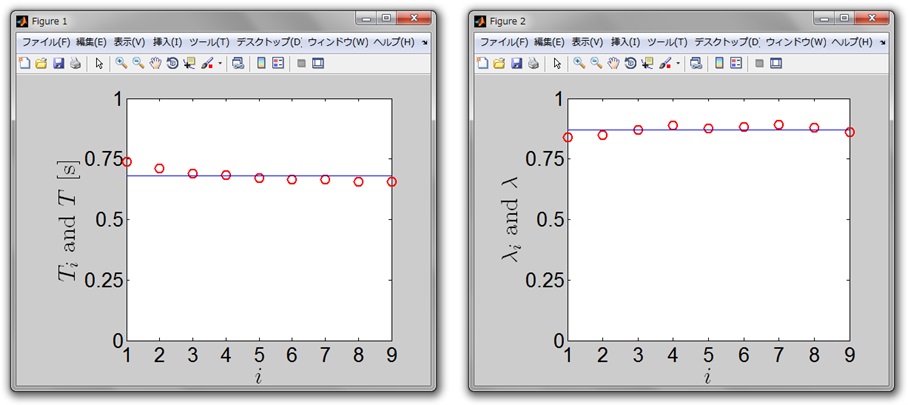
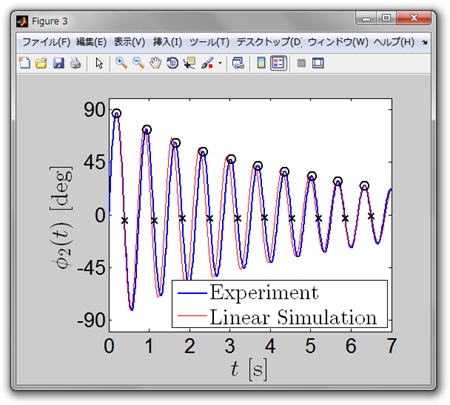
پ@ƒAپ[ƒ€‚ًŒإ’肵‚½ڈَ‘ش‚إپCگUژq‚ةڈ‰ٹْٹp“x‚ً—^‚¦‚½‚ئ‚«‚جژ©—RگU“®‚ًŒv‘ھ‚µ‚ـ‚·پD‚»‚µ‚ؤپCژ©—RگU“®‚جژüٹْ \(T\) ‚ئŒ¸گٹ—¦ \(\lambda = {A}_{i+1}/{A}_{i}\) ‚©‚ç–¢’mƒpƒ‰ƒپپ[ƒ^‚ً“¯’肵‚ـ‚·پD
چإڈ¬“ٌڈو–@‚ة‚و‚铯’è (6.5 گك)
ƒAپ[ƒ€‚جƒpƒ‰ƒپپ[ƒ^“¯’è
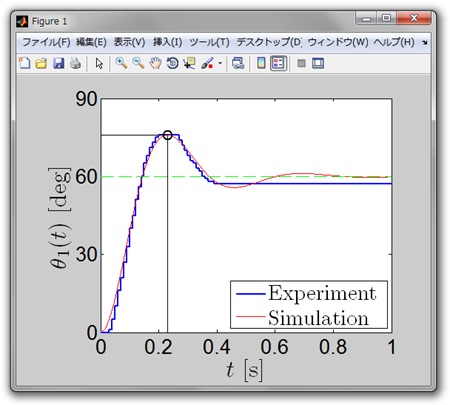
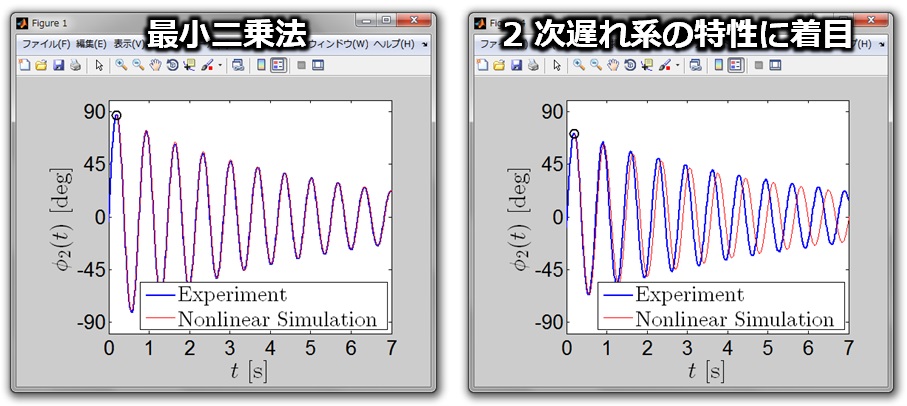
پ@ƒAپ[ƒ€‚ج P گ§Œن‚ًچs‚ء‚½‚ئ‚«‚ج“üڈo—حƒfپ[ƒ^‚©‚çچإڈ¬“ٌڈو–@‚ة‚و‚è–¢’mƒpƒ‰ƒپپ[ƒ^‚ً“¯’肵‚ـ‚·پD
‚±‚ج“¯’è–@‚إ‚حپC”Sگ«–€ژC‚¾‚¯‚إ‚ب‚“®–€ژC‚àچl—¶‚·‚邱‚ئ‚ھ‚إ‚«‚ـ‚·پD
گUژq‚جƒpƒ‰ƒپپ[ƒ^“¯’è
پ@ƒAپ[ƒ€‚ًŒإ’肵‚½ڈَ‘ش‚إپCگUژq‚ةڈ‰ٹْٹp“x‚ً—^‚¦‚½‚ئ‚«‚جژ©—RگU“®‚ج“üڈo—حƒfپ[ƒ^‚©‚çچإڈ¬“ٌڈو–@‚ة‚و‚è–¢’mƒpƒ‰ƒپپ[ƒ^‚ً“¯’肵‚ـ‚·پD
‚±‚ج“¯’è–@‚إ‚حپCگUژq‚جڈd—حچ€‚ج”ٌگüŒ`گ«‚àچl—¶‚·‚邱‚ئ‚ھ‚إ‚«‚ـ‚·پD
‰ٌ“]Œ^ƒNƒŒپ[ƒ“/“|—§گUژq‚جگ§Œن
‰ٌ“]Œ^ƒNƒŒپ[ƒ“‚جگ§Œن
‹ة”z’u–@ (7.4.2 چ€)
‹ةپF\({p}_{i} = {}-4\ \ (i = 1,\,\ldots,\,4)\)
|
‹ةپF\({p}_{i} = {}-8\ \ (i = 1,\,\ldots,\,4)\)
|
‹ةپF\({p}_{1} = {p}_{3} = {}- 8 + 8j,\ {p}_{2} = {p}_{4} = {}- 8 - 8j\)
|
چإ“KƒŒƒMƒ…ƒŒپ[ƒ^ (7.5.2 چ€)
ڈd‚فپF\(Q = {\rm diag}\bigl\{100,\,1000,\,0.01,\,0.01\bigr\},\ R = 1\)
|
ڈd‚فپF\(Q = {\rm diag}\bigl\{10000,\,1000,\,0.01,\,0.01\bigr\},\ R = 1\)
|
ڈd‚فپF\(Q = {\rm diag}\bigl\{10000,\,10000,\,0.01,\,0.01\bigr\},\ R = 1\)
|
ڈd‚فپF\(Q = {\rm diag}\bigl\{8000,\,50000,\,0.01,\,0.01\bigr\},\ R = 1\)
|
‰ٌ“]Œ^“|—§گUژq‚جگ§Œن
‹ة”z’u–@ (7.4.3 چ€)
‹ةپF\({p}_{i} = {}-6.5\ \ (i = 1,\,\ldots,\,4)\)
|
چإ“KƒŒƒMƒ…ƒŒپ[ƒ^ (7.5.3 چ€)
ڈd‚فپF\(Q = {\rm diag}\bigl\{50,\,10000,\,0.01,\,0.01\bigr\},\ R = 1\)
|