倒立振子
| アーム型倒立振子 |
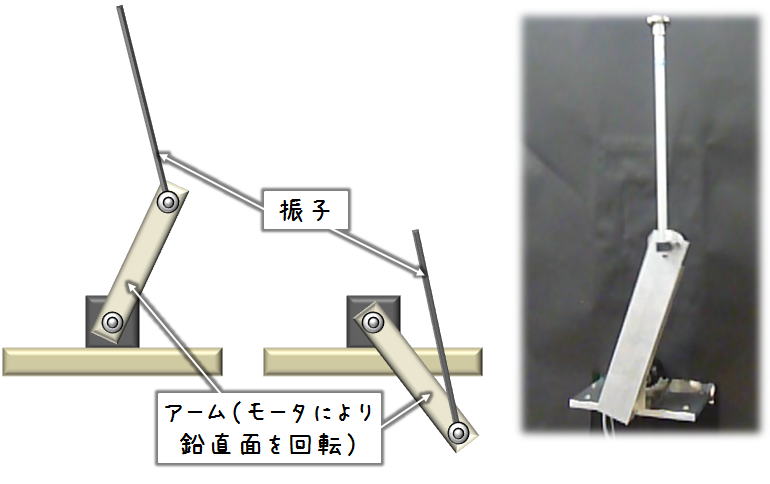 |
左図の実験装置の原形は桑原英丈君,Sahril Akmal Bin Halil 君(共に 2001 年度卒業生)が製作しました.その後,堀恵輔君(2006 年度修了生)により改良されました. | |
| 上図の倒立振子は,アームを鉛直面で回転させることにより,振子の安定化を実現します.Pendulum Robot(振子ロボット)を略した Pendubot ともよばれます.この倒立振子は単純な構造ですが,アームの姿勢が水平に近づくにつれ,振子に伝わる力の大きさが 0 に近づくため,台車型や回転型よりも制御が難しいという特徴があります. | ||
| 最適レギュレータ | ゲインスケジューリング制御 | |
30 度回転 |
30 度回転 |
|
45 度回転(振動的) |
45 度回転 |
|
60 度回転(不安定) |
60 度回転 |