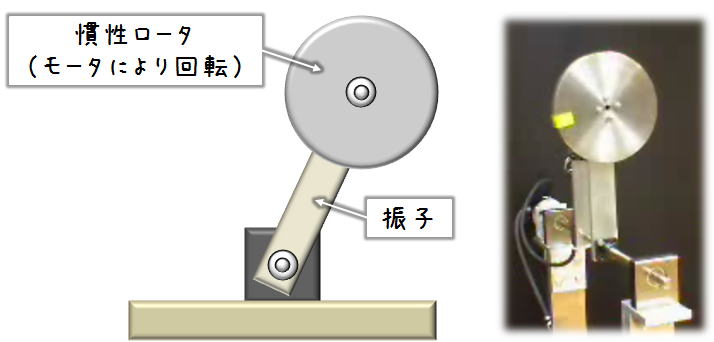
倒立振子
| 慣性ロータによる倒立振子 |
 |
左図の実験装置は粟倉正康君,高谷聡志君(共に 2004 年度卒研生)が製作しました.その後,小牧拓也君,中川靖士君(共に 2007 年度卒業生)や芦田賢士君(2009 年度卒業生)により改良が施されました. | |
| 上図の実験装置は,振子(アーム)の先端部に取り付けられた慣性ロータ(円盤)を回転させ,振子を倒立させることを目的とした実験装置です.これを応用したものとして,村田製作所の自転車ロボット「ムラタセイサク君®」が知られています(右図). |  |
| 振り上げ制御+安定化制御 | 外乱を加えたときのふるまい | |