線形システム
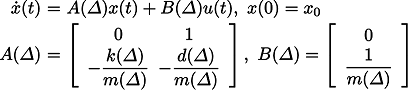
において,変動パラメータが
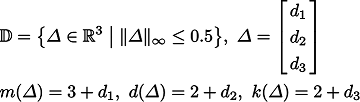
のいずれかの値をとるものとする.このとき,与えられた

に対して,

を満足する,状態フィードバック形式の安定化コントローラ

を設計する問題を考える.そのようなコントローラは,パラメータ依存 LMI
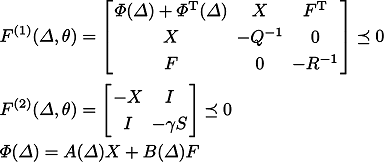
の解  が存在するとき,
が存在するとき,

により与えられる.
ここでは, が半負定であるかどうかを判別する関数を
が半負定であるかどうかを判別する関数を

としたとき,与えられた  および確率レベル
および確率レベル  について,
について,

を満足する  を求める,確率的ロバスト設計問題を考える.ここで, はパラメータ LMI の解
を求める,確率的ロバスト設計問題を考える.ここで, はパラメータ LMI の解  の要素である.
の要素である.
この問題を解くため,確率レベル  を与え,解説記事のアルゴリズム 3 で,サンプル数関数
を与え,解説記事のアルゴリズム 3 で,サンプル数関数  を
を

を満足するように選ぶ.このとき,アルゴリズム 3 の出力  について,
について,

が成立する確率が  より高いことを保証することができる.
より高いことを保証することができる.
 としたとき,最小のサンプル数を以下に示す.
としたとき,最小のサンプル数を以下に示す.
>> k =1:200; del = 0.001; p_star = 0.95;
>> N = ceil((1/2 + 2*log(k) + log(1/del))/log(1/p_star));
>> plot(k,N)
>> N(1:5)
ans =
145 172 188 199 208
また,
としたときの M ファイル ex3.m の実行結果を以下に示す.
| 実行結果 (注意:実行ごとに結果は異なるので,解説記事の結果と異なる) |
>> ex3 %%% 1 回目の実行
Running ellipsoid algorithm with pstar = 0.95 and delta = 0.001.
1-th oracle cast, interrupted on 1 iteration (max 145).
2-th oracle cast, interrupted on 1 iteration (max 172).
3-th oracle cast, interrupted on 1 iteration (max 188).
4-th oracle cast, interrupted on 1 iteration (max 199).
5-th oracle cast, interrupted on 1 iteration (max 208).
< 省 略 >
164-th oracle cast, interrupted on 1 iteration (max 344).
165-th oracle cast, interrupted on 2 iteration (max 344).
166-th oracle cast, all 345 iterations passed, solution is found!
X =
0.3573 -0.1342
-0.1342 0.3164
F =
0.2261 -0.4685
K =
0.0911 -1.4421
>> ex3 %%% 2 回目の実行
Running ellipsoid algorithm with pstar = 0.95 and delta = 0.001.
1-th oracle cast, interrupted on 1 iteration (max 145).
2-th oracle cast, interrupted on 1 iteration (max 172).
3-th oracle cast, interrupted on 1 iteration (max 188).
4-th oracle cast, interrupted on 1 iteration (max 199).
5-th oracle cast, interrupted on 1 iteration (max 208).
< 省 略 >
189-th oracle cast, interrupted on 99 iteration (max 349).
190-th oracle cast, interrupted on 50 iteration (max 350).
191-th oracle cast, all 351 iterations passed, solution is found!
X =
0.3927 -0.1313
-0.1313 0.2913
F =
-0.1018 -0.3309
K =
-0.7528 -1.4752