システム制御情報学会 学会誌 「システム/制御/情報」 55 巻 5 号,2011 年
[1] 制御系解析・設計における数値計算/数式処理ソフトウェアの活用(川田)
plant.m
M ファイル plant.m は, 制御仕様を考えたときの一般化制御対象の係数行列
制御仕様を考えたときの一般化制御対象の係数行列- 極配置仕様を考えたときの円領域
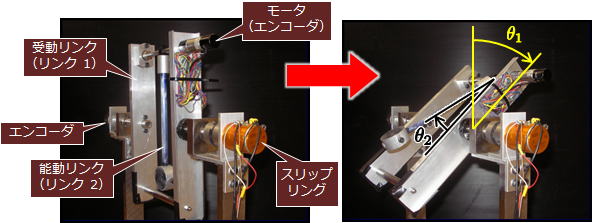 |
| 図 1 アクロボット(動画はこちら) |
図 1 のアクロボットを考える.このアクロボットは,モータにより能動リンク(リンク 2)を回転させることで,受動リンク(リンク 1)の角度
アクロボットの非線形モデルは,
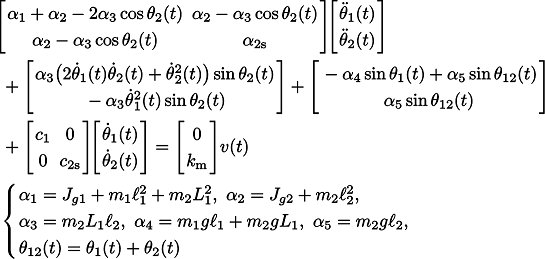
である(パラメータの意味については,M ファイルを参照).リンク 1 が真上,リンク 2 が真下で静止しているような平衡点を考え,1 次近似線形化モデルを導出すると,
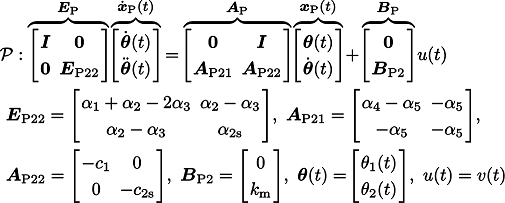
となる.この 1 次近似線形化モデルに対して,積分型コントローラ
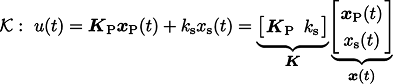
を設計する.ただし,
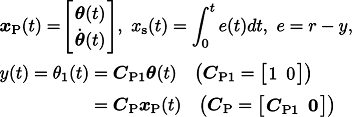
である.
 |
|
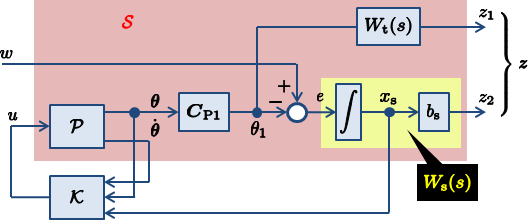
| 図 2 一般化制御対象 |
安定化コントローラの設計仕様としては,以下のものを考える.
- 制御仕様:
図 2 の制御系を構成したとき, が
が
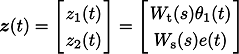
に与える影響を小さくするため,

を満足する を最小化する.ただし,
を最小化する.ただし,
であり,

は重み関数, は微分演算子である.
は微分演算子である.
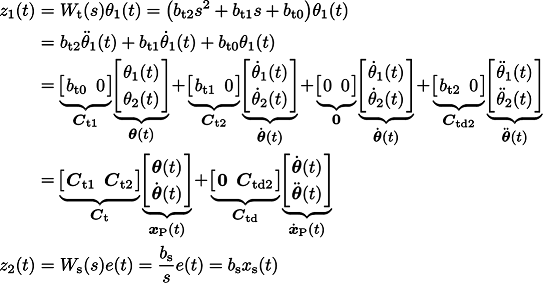
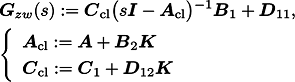
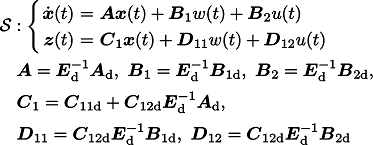
したがって,一般化制御対象は
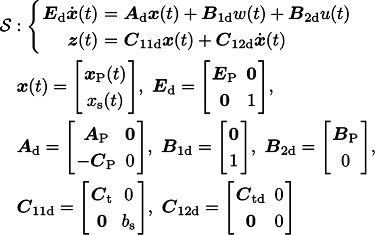
となり,さらに,これを書き換えると,次式が得られる.
- 極配置仕様:
閉ループ極 ( の固有値)
の固有値)  をすべて円領域
をすべて円領域

に配置する.
| 前のページ (kawata.zip) に戻る |