システム制御情報学会 学会誌 「システム/制御/情報」 55 巻 5 号,2011 年
[1] 制御系解析・設計における数値計算/数式処理ソフトウェアの活用(川田)
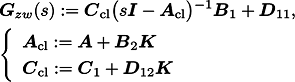
sample_lmi_ct.m
plant.m で与えられた一般化制御対象

および円領域
![]()
に対し,以下の設計仕様を満足するコントローラ
![]()
を設計する.
<設計仕様>
- (I) 円領域への極配置仕様:
閉ループ極 ( の固有値)
の固有値)  をすべて円領域に配置する.
をすべて円領域に配置する. - (II)
 制御仕様:
制御仕様:

が存在する範囲で
のように決定する.
<LMI 条件>
- (I) 円領域への極配置仕様:
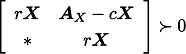
- (II) 制御仕様:
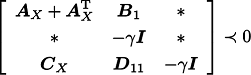
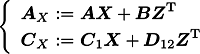
である.
| 実行結果 |
>> sample_lmi_ct
Solver for linear objective minimization under LMI constraints
Iterations : Best objective value so far
1
2
3 5.437626
4 2.514236
5 2.041024
6 2.041024
7 1.486270
8 1.267833
9 1.267833
10 1.043977
11 1.043977
12 1.043977
13 0.990801
14 0.990801
15 0.990801
16 0.990801
17 0.891910
18 0.891910
*** new lower bound: 0.435641
19 0.821455
*** new lower bound: 0.559121
20 0.821455
*** new lower bound: 0.627175
21 0.786921
*** new lower bound: 0.681904
22 0.783046
*** new lower bound: 0.756416
23 0.777802
*** new lower bound: 0.759309
24 0.777404
*** new lower bound: 0.770019
Result: feasible solution of required accuracy
best objective value: 0.777404
guaranteed absolute accuracy: 7.39e-003
f-radius saturation: 0.000% of R = 1.00e+009
gamma_opt =
0.7774
X_opt =
59.5818 4.6833 -148.2734 -20.4745 14.5430
4.6833 1.5149 -7.1665 -4.9336 1.4158
-148.2734 -7.1665 408.5814 51.0521 -30.8600
-20.4745 -4.9336 51.0521 79.0075 -3.9719
14.5430 1.4158 -30.8600 -3.9719 4.5519
Z_opt =
-5.5435
-2.4766
12.4753
3.8301
-1.1345
K_opt =
6.4336 -7.7029 1.7496 -0.2352 -6.7519
| 前のページ (kawata.zip) に戻る |