



電子制御工学科
授業紹介
Control Engineering

1年生メカトロニクス演習Ⅰ
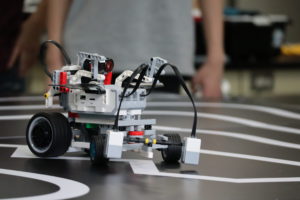
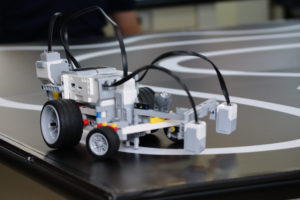
1年生の「メカトロニクス演習 I」では、メカトロニクス技術の導入教育として、「レゴ・マインドストームEV3を用いたライントレーサの開発」を行っています。この授業はグループで取り組むプロジェクト型学習であり、1班は2名で構成されます。全15週で行われる演習の前半で、ライントレーサの基本的な動作原理を学習し、初心者でも簡単にプログラムが作成可能な「ビジュアル(グラフィカル)言語」である「EV3ソフトウェア」を使いオリジナルなライントレーサーを開発します。そして、開発したランイトレーサーで競技会を行っています。演習の後半では、プログラム作成として「テキスト記述型言語」の「ROBOTC」を使用します。ROBOTCは、プログラミング言語「C言語」に準拠した書式です。演習の後半でも、各班ごとにオリジナルなライントレーサーを開発します。そして、開発したライントレーサーで競技会を行います。

1年生メカトロニクス演習Ⅱ
2年生の「メカトロニクス演習Ⅱ」では、「Zumo 32U4を用いたロボットプログラミング実習」と「シーケンス制御実習」を行っています。ロボットプログラミング実習では、1人1台の小型移動ロボットを使いプログラムでロボットを動かす体験を通じ、抽象的なプログラミングのイメージを体験的に学習することを目的としています。使用するロボットは、無限軌道式ロボットプラットフォームZumo 32U4で、Arduinoと互換性のあるマイコンが搭載されています。シーケンス制御実習では、シーケンス制御の実習装置を使い体験的にシーケンス制御の基本を身につけることを目的としています。シーケンス制御は、家電製品や工場など、身の回りにあるさまざま機器の制御に利用されています。


2年生電子制御実習
2年生の「電子制御実習」では、電子工作の実習と機械工作の実習(工場実習)を行っています。
電子工作実習
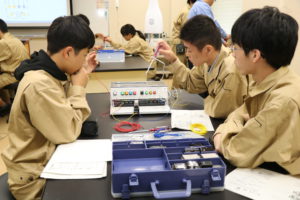
計測基礎として、ディジタルマルチメータの使い方を習得します。計測原理を説明した後、実際に電子部品の計測を行います。精度の高い測定器の値と比較し、どのくらいの精度で計測できるのか検討します。回路基礎として、はんだ付けの実習を行っています。抵抗やコンデンサなどの基本的な素子についての知識を身に着けます。その後、PBL(課題解決型学習)によるアクティブ・ラーニングとして、ライントレーサー(白いラインをたどって進むロボット)を製作する実習を行っています。そこでは、床面の明るさを判断する回路製作だけでなく、筐体の機械工作も自らが行い、各々がオリジナルのライントレーサーを製作します。最終日にはタイムレースを行い、達成感を味わうことができます。



機械工作実習(工場実習)
工場実習として、旋盤(せんばん)、フライス盤、マシニングセンタ、溶接などの工作実習を行います。旋盤(せんばん)とは、削りたい材料(被削材料)を回転させ、その材料よりも硬い材質の刃物(バイト)をあてることで削る工作機械です。フライス盤とは、直方体のように角ばった形状の被削材料をテーブル上に固定し、硬い材質の刃物を回転させることで、目的の形にしていく工作機械です。マシニングセンタ(Machining Center)とは、自動工具交換機能をもち、目的に合わせてフライス・穴あけ・中ぐり・ねじ立てなど様々な加工を1台で行うことができる数値制御(NC:Numerical Control)工作機械です。旋盤やフライス盤の実習が手作業での加工だったのに対し、この実習ではプログラムによる自動加工を行います。金属と金属を溶かしてつなぎ合わせ、一体化することを溶接といいます。本実習では、代表的な溶接の方法として、アーク溶接とガス溶接を学びます。



3年生電子制御実験
3年生の「電子制御実験」では、前期から後期の前半にかけて「電気電子回路の実験」、後期の後半に「レゴ・マインドストームEV3による競技課題」を実施しています。
電気電子回路の実験(前期・後期)
電気電子回路の実験では、1班2~3名で家電やロボットを動かす原動力となる回路の実験を行います。抵抗・コンデンサ・コイルやダイオード・トランジスタ・オペアンプの電気的特性を測定・観測し、これらを組み合わせた整流回路や論理回路の基礎を学んだ後、AMラジオや電子ルーレットなどに応用する回路設計技術を体得します。
レゴ・マインドストームEV3による競技課題(後期)
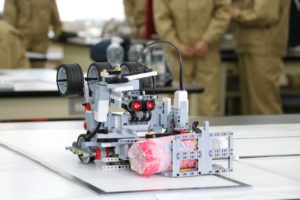
プログラミングによりペットボトルを運搬する自律型のロボットを、レゴ・マインドストームEV3により開発します。車体が白いフィールドから落ちないように制御しながらペットボトルを所定の場所に移動させ、そのタイムや運搬機構の独創性を競います。重心やトルクの計算といった機械的技術、超音波センサやジャイロセンサなどを用いたセンシング技術、プログラミングによる情報処理技術を総合的に学びます。


4年生創造設計プロジェクト
4年生の「創造設計プロジェクト」では、半年間のグループワークによるロボット開発を通じ、実践的にメカトロニクス技術を身につけるだけでなく、創造性やコミュニケーション能力を高ます。ロボット開発は4名程度のグループに分かれて開発します。それぞれのグループのメンバーは、リーダー、機構設計製作、組込みマイコン開発、戦略構築などの役割を分担します。



4年生機械工学実験
4年生の「機械工学実験」では、機械工学系の基幹科目である材料力学、水力学、熱力学、振動工学およびロボット工学に関連する実験に臨みます。1班は4名で、各テーマに対して、2週に渡って実験、データ整理、報告書作成に取り組み、グラフ作成や実験結果を分析・考察する能力を養います。実験は、下記4テーマとなっています。
- レーザ変位計によるはりのたわみ測定
- 自然対流の可視化とPIV計測
- 多自由度マニピュレータの運動学
- ロボットグリッパの力学解析



5年生制御工学実験
5年生の「制御工学実験」では、制御工学やロボット工学に関連した実験を行っています。 実験は、下記のテーマとなっています。
- ロボットアームの角度制御
- 倒立振子のパラメータ同定と安定化
- 産業用ロボットの手先位置制御
- PLC によるシーケンス制御
5年生卒業研究
5年生では各研究室に4名程度配属され、各研究室の専門分野(計測制御、電気電子、機械、情報)に関する研究に1年間取り組みます。以下に、電子制御工学科で学生が行った卒業研究の一部を紹介しています。
【制御系分野】劣駆動ロボットのゲインスケジューリング制御
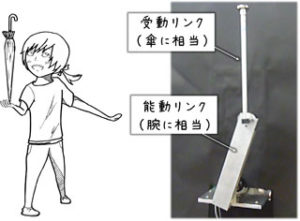
劣駆動ロボットとは、少ない数のモータで多リンクを動かすロボットです。たとえば、手のひらの上の傘を立たせる遊びを考えると、腕の関節を適切に動かすことで、傘が倒れないように制御する必要があります。姿勢によって傘に伝わる力は複雑に変化しますので、傘の倒立を維持させるような制御は難しいのです。そこで、ゲインスケジューリングと呼ばれる手法で、複雑に変化する特性に対処することを研究しています。
【電気電子系分野】室温インプリント法によるダイヤモンドライクカーボンマイクロギヤの作製
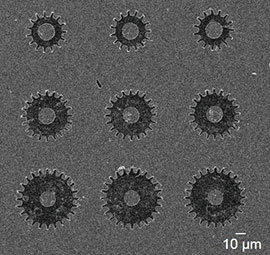
ナノインプリントリソグラフィ技術は、低コストかつ高スループットでナノパターンを一括転写で大量生産できるナノテクノロジーの1つとして注目されています。また、ダイヤモンドライクカーボンは、高耐摩耗性、高硬度、高生体親和性などの特異な性質を持つため医療用マイクロマシンの摺動部品の材料として期待されています。 本研究では、室温で徐々に硬化するはしご型HSQ(水素シルセスキオキサン)を新たな転写材料とし、凹形状のPDMS(ポリジメチルシロキサン)モールドを用いた室温ナノインプリント法により、ダイヤモンドライクカーボンの超微細加工を行い、刃先円直径40μm、50μm、60μm、高さ約300nmの高精度なマイクロギヤを作製しました。 本研究で開発したプロセスがマイクロ・ナノ機能性デバイスの生産ラインに使用される可能性が大いに期待されています。
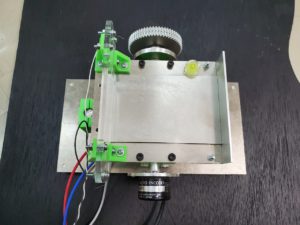
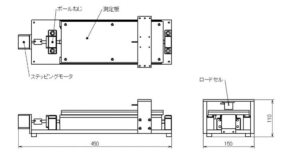
【機械系分野】教育用トライボロジー実験教材の開発
金属の摩擦係数を測定することを目的に、1軸ステージおよび傾斜法による2種類の実験装置を学生が設計・製作し、その特性評価を行っています。この実験装置は、4年生の機械工学実験で使用され、問題点をフィードバックして熟成を重ねてきました。実験により、工学に直結する摩擦現象の複雑さが明らかになっています。

【情報系分野】ROSを用いた移動ロボットシステムによる教育用コンテンツの開発
ROS(Robot Operating System)を用いた移動ロボットシステムの開発と、そのロボット教育への展開を目的とし、Pololu社のZumo 32U4やiRobot社のRommbaなどの小型移動ロボットに制御用のコンピュータとセンサーを搭載した自律移動ロボットの開発し、ロボットエンジニアリング教育への展開を目的とした教育用コンテンツの開発を行っています。


